
'PosiTTron' Прототип аддона для позиционного слежения Oculus Rift DIY - Страница 2 из 4 - Дорога к VR
Мое решение
Оборудование:
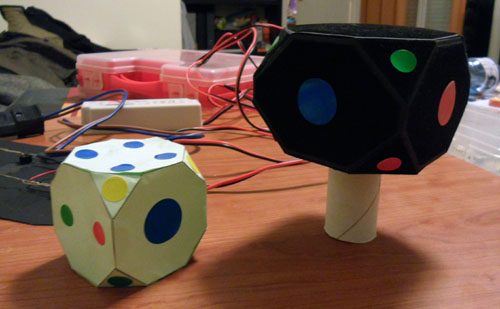
 Прежде всего, я хотел бы представить «усеченный куб», если вы его не знаете!
Прежде всего, я хотел бы представить «усеченный куб», если вы его не знаете!
Приятной особенностью усеченного куба является то, что как бы вы ни смотрели на него, вы всегда можете увидеть как минимум 4 его грани. Для оценки позы трехмерного объекта вам необходимо постоянно видеть 4 некомпланарные точки, поэтому, если бы мы поместили маркеры на каждую грань усеченного куба, это могло бы идеально подойти для нашей цели. К счастью, это не обязательно должен быть полностью однородный многогранник; усеченный кубоид также разделяет эту характеристику. Еще одна хорошая вещь в этом типе многогранников заключается в том, что их форма может легко стать основой конструкции корпуса HMD.
Интеграция с маркерами:
Следующая проблема, которая у нас есть, заключается в том, что для оценки позы нам нужно не только «видеть» маркеры, но и уметь их идентифицировать, например, поставить число каждому маркеру и определить, какой из них является каким.
Инфракрасные (ИК) маркеры популярны, потому что их очень легко отличить от фона с помощью надлежащих фильтров, но возможность обнаружения нескольких цветов может значительно облегчить проблему. Цвета в видимом спектре, очевидно, труднее обнаружить, чем ИК, но у нас есть кое-что, что мы можем использовать в наших интересах - поскольку мы интегрируем эти маркеры в HMD, мы можем фактически контролировать фон, где отображаются цвета, чтобы упростить обнаружение капель.
Вот некоторые из моих первых экспериментов, где я решил использовать простые цветные наклейки на самом темном фоне. Для этого я использовал флокированную бумагу, найденную в телескопах, что более практично и равномерно, чем, например, использование черного бархата. Я использую PlayStation Eye в качестве основной камеры для обработки изображений.
С этой настройкой мне удалось получить довольно хорошие результаты; этого было достаточно, чтобы построить алгоритм анализа основного блоба, и я смог различить четыре основных цвета (красный, зеленый, синий, желтый). Как и ожидалось, проблема заключалась в том, что результат сильно зависел от окружающего света, небольшие изменения приводили к ошибкам распознавания. Очевидным следующим шагом стал переход на цветные светодиоды.
Оглядываясь назад, найти правильные светодиоды для использования было одной из самых больших неожиданных трудностей; они должны иметь широкий угол обзора и равномерный свет, и мне пришлось протестировать немало с различной интенсивностью тока и настройками камеры, пока я не нашел те, которые работали достаточно хорошо.
Я также узнал, что мне пришлось уменьшить усиление и экспозицию камеры почти до минимально возможных настроек, чтобы получить правильные цвета (не переэкспонирование белого), это, в свою очередь, помогло уменьшить «следы» пятен при быстрых движениях, а также имело другой желательный эффект: поскольку все изображение затемнено, обнаружение капель уже решено наполовину, потому что выделяются только яркие источники света. Это фактически делает стекающуюся темную бумагу совершенно ненужной, но я все равно решил ее оставить. Здесь я допустил глупую ошибку: я провел все эти тесты с камерой, работающей на скорости 30 кадров в секунду вместо 60, и позже я понял, что это действительно влияет на обнаружение цвета.
Здесь вы можете увидеть источник питания, который я использовал, и один из тестов, которые я провел со светодиодами:

Как только я был доволен светодиодами, я обнаружил, что пришло время построить основной прототип. Теоретически нам нужно иметь только один маркер на каждой стороне усеченного кубоида (16), таким образом, мы всегда видим минимум 4 некомпланарных точки (и большую часть времени, что неплохо). На практике, однако, этот кубоид должен быть разделен на 2 части (передняя и задняя часть HMD). Я подумал, что по бокам и сверху было бы лучше иметь светодиоды на обеих частях, даже если они разделяют одну теоретическую плоскость. Это необходимо для преодоления окклюзии самой головой / шеей.
Несмотря на то, что в этом не было особой необходимости, я решил использовать несколько контрольных ламп для передней и задней части, чтобы иметь еще два разных типа маркеров, которые помогут в определении точки. Я также решил разместить по два светодиода сверху и снизу каждой части, чтобы мы могли обнаружить по крайней мере четыре, если смотреть прямо сверху / снизу, без зависимости от другой части HMD. Позже я пожалел об этих решениях, поскольку они усложняют дизайн, алгоритм обнаружения и фактически создают больше проблем, чем выгод.
Еще одна ошибка, которую я сделал в ретроспективе, заключалась в том, чтобы фиксировать интенсивность светодиодов с помощью регуляторов напряжения LM317 в сочетании с фиксированными резисторами ... Я должен был вместо этого использовать потенциометры, чтобы иметь возможность изменять интенсивность светодиодов без необходимости повторной пайки ... Ну что ж.
В итоге мой окончательный дизайн содержал 22 отдельных маркера шести разных типов: красный, зеленый, синий, белый, синий пилот, желтый пилот.
Очевидно, что для правильного определения 22 различных маркеров было бы идеально, если бы у нас было 22 различных цвета, но это на самом деле не практично, и я бы осмелился сказать, что это невозможно, по крайней мере, с оборудованием PlayStation Eye. Однако наличия 4 или 6 различных типов маркеров достаточно для обнаружения точек, если вы распределяете их более или менее хитро и учитываете окружающие маркеры, пытаясь идентифицировать отдельный. Светодиоды не должны быть в точном положении, которое я использовал, или в одном цвете, вы можете проявить креативность с этим. Единственными двумя правилами всегда являются четыре некомпланарные точки, видимые и окрашенные таким образом, чтобы их можно было сопоставить с полной трехмерной моделью.
Фотографии сборки:



DIY грубая смета:
- LM317Ts, резисторы, провода и т. Д. -> 5 $ aprox
Массовая покупка компонентов может значительно снизить стоимость, вероятно, до 12 долларов, если не считать камеру. При самостоятельной работе вам может потребоваться добавить источник питания переменного / постоянного тока (приблизительно 15 $), что, разумеется, не обязательно, если он интегрирован с существующим источником питания HMD.
Вот изображения готового прототипа:


Похожие
Бегут женщины - они хуже мужчин? - MagazynBieganie.pl - ЛУЧШАЯ беговая страница!Марафон в Йокогаме - одно из немногих элитных мероприятий без участия мужчин. Рис. Photorun.net Лучник Ники Доминика Ставчик-Стельмах - очень быстрый бегун из Варшавы, который годами лидировал